Debugging application with cross-GDB in Yocto environment
GDB is a very useful tool when debugging applications. Embedded devices lack sophisticated features that Development machines enjoy like better processor speed, huge RAM, etc. In such cases running GDB on the target will be painfully slow. But thanks to remote-debugging support from GDB which saves us from such situations. In this post we'll see how to do remote debugging of an application running on Raspberry Pi 3.
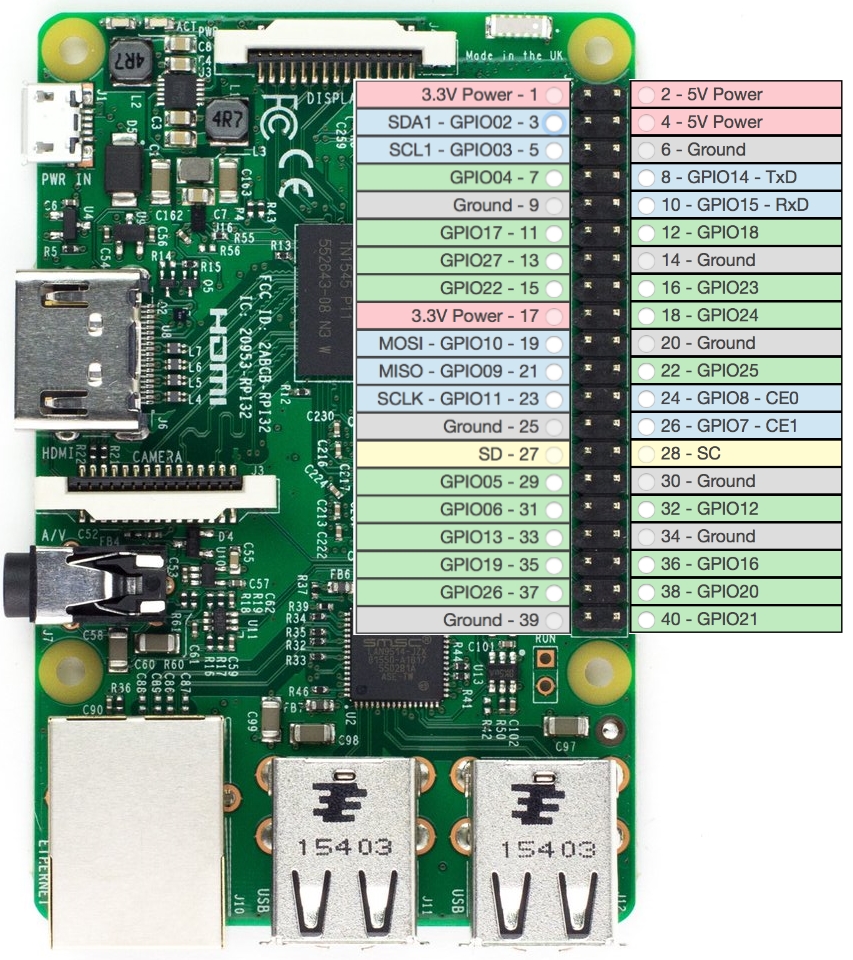
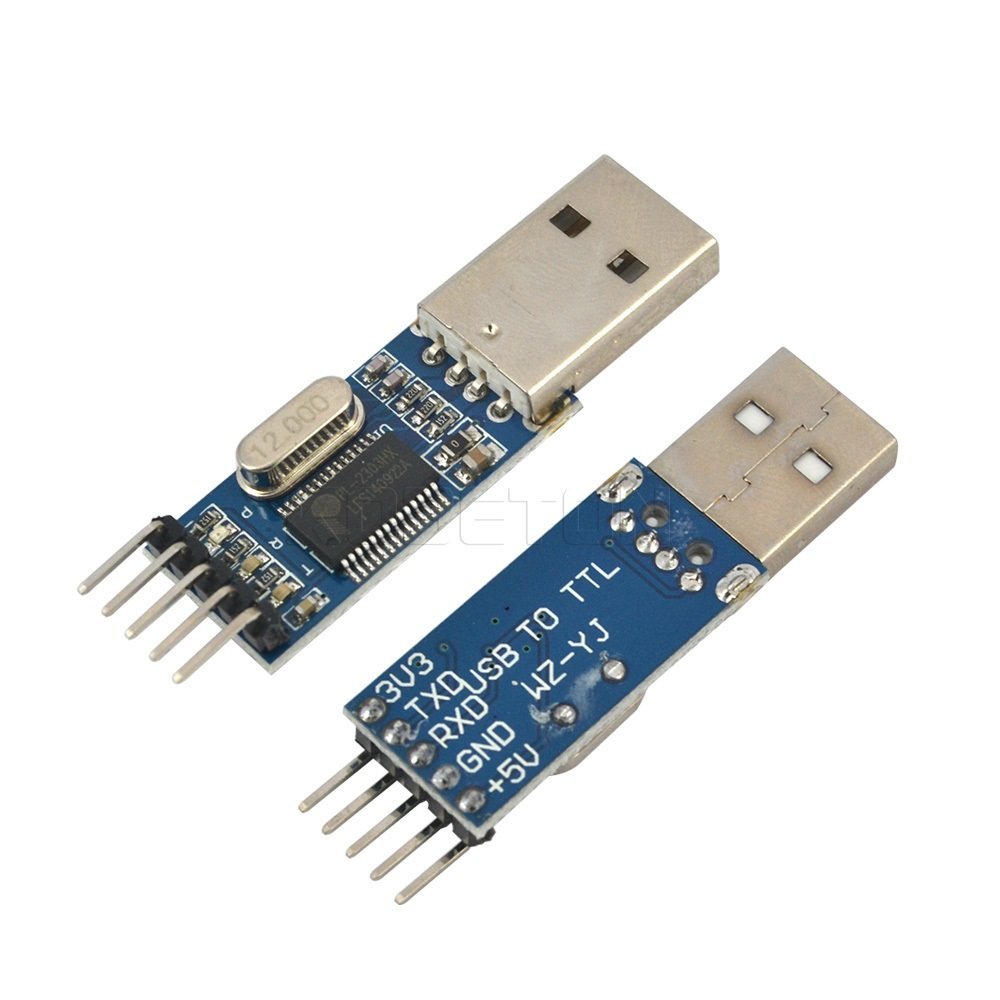
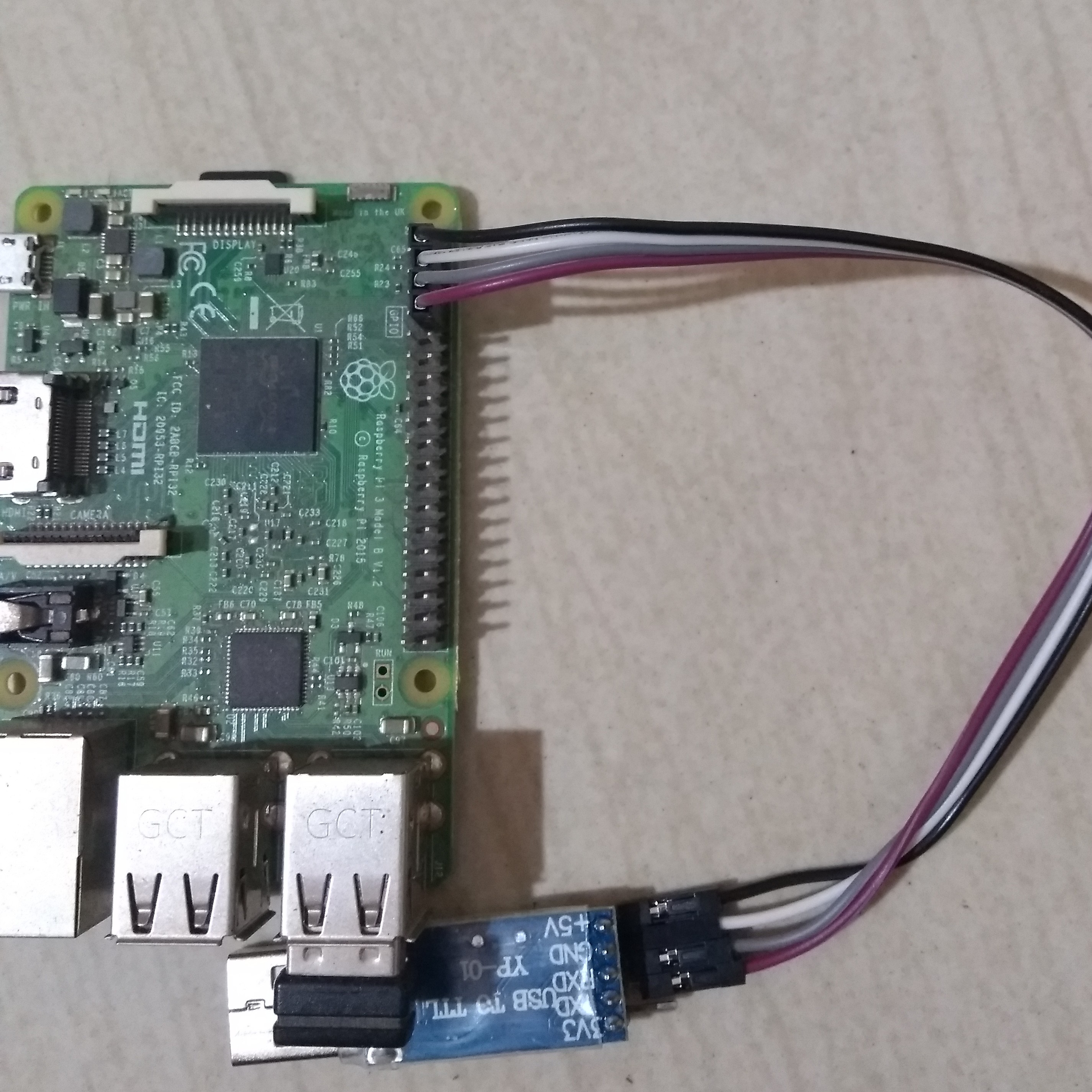
You can read previous posts to have better understanding about Yocto build environment and how to setup serial connection with Raspberry pi 3.
Target program and compilation
Going along with the world, we'll start with traditional Hello World program. Write the C program and cross-compile it to arm64 platform. Secure copy the executable binary to Raspberry Pi 3.
kaba@kaba-Vostro-1550:~/Desktop/workbench/code
$ cat syscall.c
#include <stdio.h>
int main()
{
printf("Hello world!\n");
return 0;
}
kaba@kaba-Vostro-1550:~/Desktop/workbench/code
$ source /opt/poky/2.4.2/environment-setup-aarch64-poky-linux
kaba@kaba-Vostro-1550:~/Desktop/workbench/code
$ $CC -g syscall.c -o syscall.arm64.debug
kaba@kaba-Vostro-1550:~/Desktop/workbench/code
$ $CC syscall.c -o syscall.arm64
kaba@kaba-Vostro-1550:~/Desktop/workbench/code
$ ls
total 36K
-rwxr-xr-x 1 kaba kaba 14K Jun 3 12:07 syscall.arm64
-rwxr-xr-x 1 kaba kaba 16K Jun 3 12:07 syscall.arm64.debug
-rw-r--r-- 1 kaba kaba 73 May 31 06:48 syscall.c
kaba@kaba-Vostro-1550:~/Desktop/workbench/code
$ scp ./syscall.arm64 root@192.168.0.101:
syscall.arm64 100% 13KB 488.8KB/s 00:00
kaba@kaba-Vostro-1550:~/Desktop/workbench/code
$
cross-GDB.
Build GDB-server
Add gdbserver tool to the target image by enabling tools-debug in EXTRA_IMAGE_FEATURES. Run the Hello World program in target, attached with gdbserver that listens on network.
root@raspberrypi3-64:~# gdbserver 192.168.0.101:2345 ./syscall.arm64
Process ./syscall.arm64 created; pid = 1671
Listening on port 2345
remote-gdb to attach.
Build GDB with TUI support
GDB has a tui [Text User Interface] mode which will be very much useful while debugging. With tui enabled, we can see the code that runs, equivalent assembly instruction, current register values, etc., simultaneously. But by default the GDB in Yocto doesn't build with tui support. Append --enable-tui option to gdb-cross bbfile. And build the SDK as mentioned here.
kaba@kaba-Vostro-1550:~/Desktop/yocto/yocto
$ tree meta-kaba-hacks/
meta-kaba-hacks/
├── conf
│ └── layer.conf
├── COPYING.MIT
├── recipes-devtools
│ └── gdb
│ └── gdb-%.bbappend
└── recipes-kernel
└── linux
├── linux-raspberrypi
│ ├── debug.cfg
│ └── enable_proc_zconfig.cfg
└── linux-raspberrypi_4.9.bbappend
kaba@kaba-Vostro-1550:~/Desktop/yocto/yocto
$ cat meta-kaba-hacks/recipes-devtools/gdb/gdb-%.bbappend
EXTRA_OECONF += " --enable-tui"
kaba@kaba-Vostro-1550:~/Desktop/yocto/yocto
$ bitbake core-image-base -c populate_sdk
kaba@kaba-Vostro-1550:~/Desktop/yocto/yocto
$ ./tmp/deploy/sdk/poky-glibc-x86_64-core-image-base-aarch64-toolchain-2.4.2.sh
kaba@kaba-Vostro-1550:~/Desktop/yocto/yocto
$
Launch
Run cross-GDB with tui enabled and connect it to the target.
kaba@kaba-Vostro-1550:~/Desktop/workbench/code
$ source /opt/poky/2.4.2/environment-setup-aarch64-poky-linux
kaba@kaba-Vostro-1550:~/Desktop/workbench/code
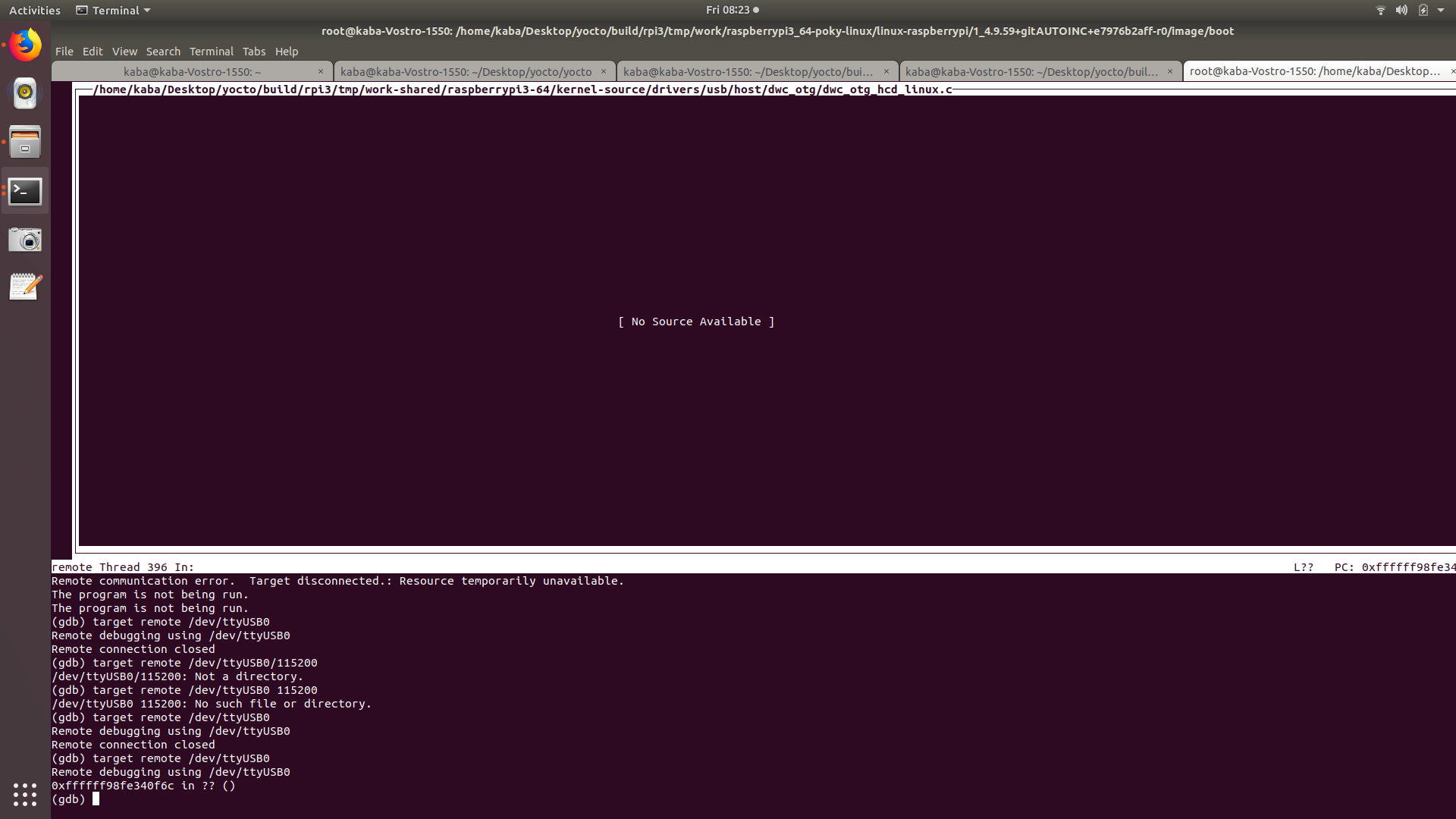
$ $GDB -tui ./syscall.arm64.debug
GDB window will open-up similar to the screenshot at the top of this post (zoom-in your web page to see the image details clearly). Below I'm copying only the command-panel of GDB. Based on the commands you run, the other panels will also get changed.
Connect to target program waiting for remote-GDB.
(gdb) target remote 192.168.0.101:2345
Remote debugging using 192.168.0.101:2345
Reading /lib/ld-linux-aarch64.so.1 from remote target...
warning: File transfers from remote targets can be slow. Use "set sysroot" to access files locally instead.
Reading /lib/ld-linux-aarch64.so.1 from remote target...
Reading symbols from target:/lib/ld-linux-aarch64.so.1...Reading /lib/ld-2.26.so from remote target...
Reading /lib/.debug/ld-2.26.so from remote target...
(no debugging symbols found)...done.
0x0000007fb7fd2f40 in ?? () from target:/lib/ld-linux-aarch64.so.1
(gdb)
Now it connected to the target program. But it is not very much helpful. Because it tries to load the symbols and source from target board. The target has no source or symbol. Lets direct GDB to load source and symbol from host machine.
(gdb) set sysroot /opt/poky/2.4.2/sysroots/aarch64-poky-linux/
warning: .dynamic section for "/opt/poky/2.4.2/sysroots/aarch64-poky-linux/lib/ld-linux-aarch64.so.1" is not at the expected address (wrong library or version mismatch?)
Reading symbols from /opt/poky/2.4.2/sysroots/aarch64-poky-linux/lib/ld-linux-aarch64.so.1...Reading symbols from /opt/poky/2.4.2/sysroots/aarch64-poky-linux/lib/.debug/ld-2.26.so...done.
done.
Reading symbols from /opt/poky/2.4.2/sysroots/aarch64-poky-linux/lib/ld-linux-aarch64.so.1...Reading symbols from /opt/poky/2.4.2/sysroots/aarch64-poky-linux/lib/.debug/ld-2.26.so...done.
done.
(gdb) info sharedlibrary
From To Syms Read Shared Object Library
0x0000007fb7fd2dc0 0x0000007fb7fe9fc8 Yes /opt/poky/2.4.2/sysroots/aarch64-poky-linux/lib/ld-linux-aarch64.so.1
(gdb)
main and continue. So the program will pause once it reaches main. Now if you see, there will be another shared library loaded.
(gdb) break main
Breakpoint 1 at 0x40056c: file syscall.c, line 5.
(gdb) c
Continuing.
Breakpoint 1, main () at syscall.c:5
(gdb) info sharedlibrary
From To Syms Read Shared Object Library
0x0000007fb7fd2dc0 0x0000007fb7fe9fc8 Yes /opt/poky/2.4.2/sysroots/aarch64-poky-linux/lib/ld-linux-aarch64.so.1
0x0000007fb7ea0700 0x0000007fb7f8a118 Yes /opt/poky/2.4.2/sysroots/aarch64-poky-linux/lib/libc.so.6
(gdb)
printf on the top panel will be highlighted. It means, that is the current line to be executed. Lets step in to the definition of printf.
(gdb) s
_IO_puts (str=0x400638 "Hello world!") at /usr/src/debug/glibc/2.26-r0/git/libio/ioputs.c:36
(gdb)
No Source Available error. This is because GDB searches the source files in wrong directory. Have a second look at last output. GDB searches ioputs.c in /usr/src/debug/glibc/2.26-r0/git/libio directory. Lets set the path to shared library correct.
(gdb) set substitute-path /usr/src/debug/ /home/kaba/Desktop/yocto/build/rpi3/tmp/work/aarch64-poky-linux/
(gdb)
GDB commands and have fun.
References
- [https://sourceware.org/gdb/onlinedocs/gdb/Source-Path.html]
- [http://visualgdb.com/gdbreference/commands/sharedlibrary]
- [http://visualgdb.com/gdbreference/commands/set_solib-search-path]
- [https://www.yoctoproject.org/docs/1.4.2/adt-manual/adt-manual.html]
- [https://www.yoctoproject.org/docs/latest/mega-manual/mega-manual.html]